Combo xe 3 bánh tránh vật cản Arduino
Danh sách sản phẩm sử dụng trong combo Khung xe robot 3 bánh Cảm Biến Siêu Âm HC-SR04 Đế module cảm biến siêu âm HC-SR04 Động cơ servo SG90 180 độ Hộp Pin 18650 2 cell có nắp...

KKK Shop
@kkk-shopĐánh giá
Theo Dõi
Nhận xét
Thương hiệu
OEM
Xuất xứ thương hiệu
Việt Nam
Xuất xứ (Made in)
Việt Nam
Sản phẩm có được bảo hành không?
Không
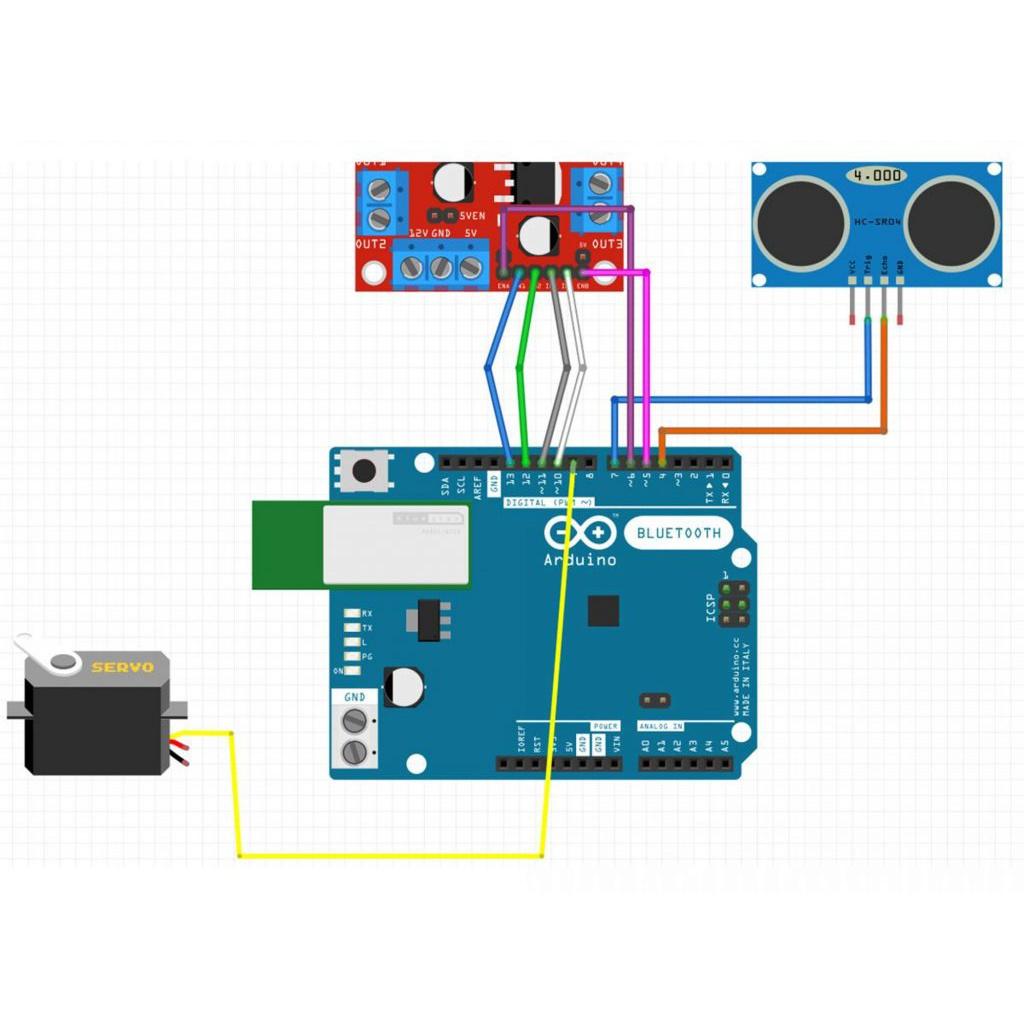
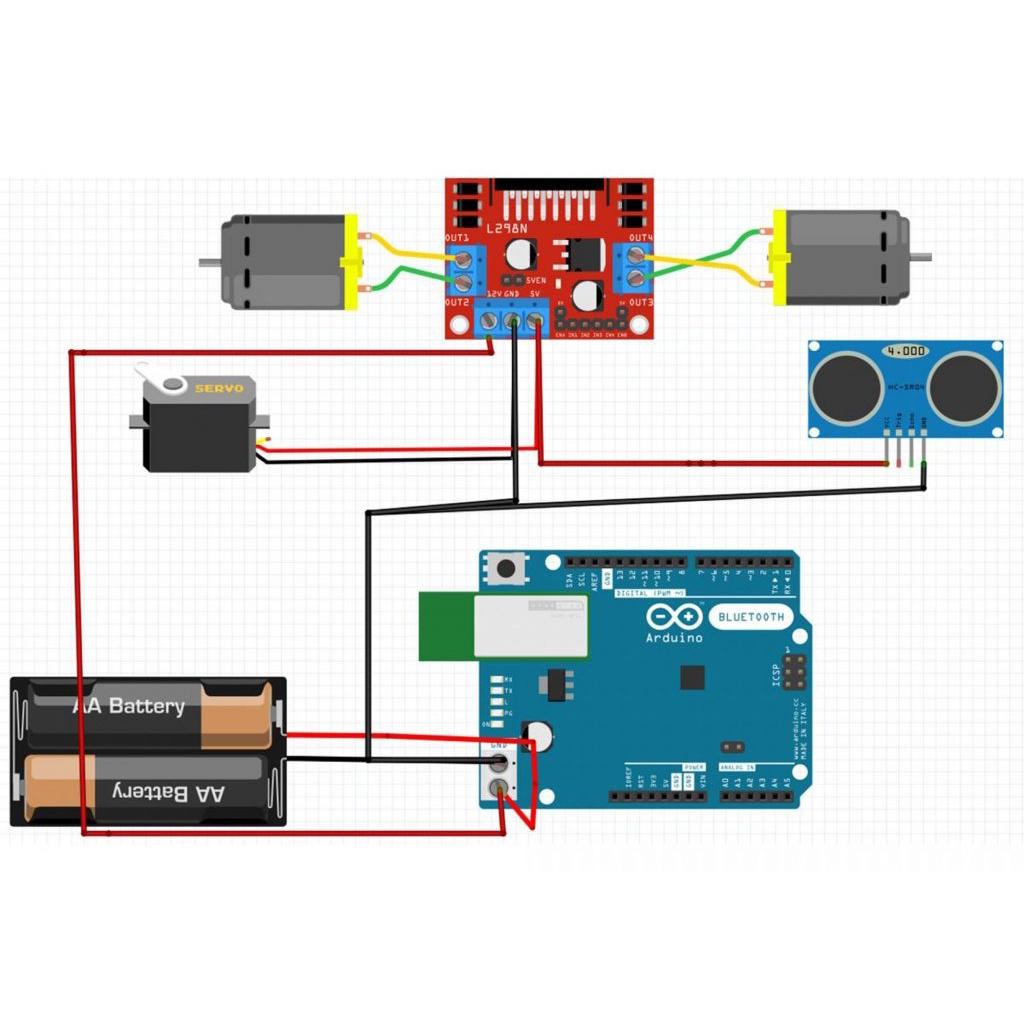
Danh sách sản phẩm sử dụng trong combo Khung xe robot 3 bánh Cảm Biến Siêu Âm HC-SR04 Đế module cảm biến siêu âm HC-SR04 Động cơ servo SG90 180 độ Hộp Pin 18650 2 cell có nắp và công tắc Pin cell 18650 2000mAh x2 Jack DC đực có dây Dây Cắm Test Board Đực Đực 30cm ( 10 sợi ) Dây Cắm Test Board Đực Cái 30cm ( 20 sợi ) Thông số kỹ thuật của Combo tự làm xe 3 bánh tránh vật cản Arduino Dòng tiêu thụ trung bình: 0.5A Dòng chờ: 0.06A Trọng lượng: 500g Lưu ý: combo này là tự ráp, quý khách chỉ cần đấu nối và nạp code theo đúng sơ đồ là chạy, quý khách có thể chỉnh sửa lại code để tối ưu hơn Sơ đồ đấu nối của Combo tự làm xe 3 bánh tránh vật cản Arduino Cấp nguồn Arduino + L298N sẽ lấy nguồn từ bộ 2 pin 18650 Servo + SR04 sẽ lấy nguồn từ L298N 2 động cơ sẽ lấy nguồn từ L298N Sơ đồ đấu nối của Combo tự làm xe 3 bánh tránh vật cản ArduinoSơ đồ đấu nối của Combo tự làm xe 3 bánh tránh vật cản Arduino Đấu dây tín hiệu Chân trig của SR-04 = 7 Chân echo của SR-04 = 4 Chân IN2 Module L298 = 12 Chân IN3 Module L298 = 11 Chân IN4 Module L298 = 10 Chân ENB Module L298 = 5 Sơ đồ đấu nối của Combo tự làm xe 3 bánh tránh vật cản Arduino Sơ đồ đấu nối của Combo tự làm xe 3 bánh tránh vật cản Arduino Code mẫu //our L298N control pins const int LeftMotorForward = 13; // banh ben trai tien const int LeftMotorBackward = 12; // banh ben trai lui const int RightMotorForward = 11; // banh ben phai tien const int RightMotorBackward = 10; // banh ben phai lui const int ena = 6; const int enb = 5; //sensor pins SR04 boolean goesForward = false; int distance = 100; NewPing sonar(trig_pin, echo_pin, maximum_distance); //sensor function Servo servo_motor; //our servo name void setup(){ (9600); pinMode(RightMotorForward, OUTPUT); pinMode(LeftMotorForward, OUTPUT); pinMode(LeftMotorBackward, OUTPUT); pinMode(RightMotorBackward, OUTPUT); pinMode(ena, OUTPUT); pinMode(enb, OUTPUT); servo_h(9); //our servo pin servo_(90); delay(2000); distance = readPing(); delay(100); distance = readPing(); delay(100); distance = readPing(); delay(100); distance = readPing(); delay(100); an Giá sản phẩm trên Tiki đã bao gồm thuế theo luật hiện hành. Bên cạnh đó, tuỳ vào loại sản phẩm, hình thức và địa chỉ giao hàng mà có thể phát sinh thêm chi phí khác như phí vận chuyển, phụ phí hàng cồng kềnh, thuế nhập khẩu (đối với đơn hàng giao từ nước ngoài có giá trị trên 1 triệu đồng).....Sản phẩm này là tài sản cá nhân được bán bởi Nhà Bán Hàng Cá Nhân và không thuộc đối tượng phải chịu thuế GTGT. Do đó hoá đơn VAT không được cung cấp trong trường hợp này.
Sản Phẩm Liên Quan